


-3.png?length=1000&name=Inpixon%20LinkedIn%20Banner%20August%202025%20(2)-3.png)
What is a Real-Time Location System?

Real-time location systems (RTLS) enable you to digitally track the real-time location and movements of physical things throughout large facilities. RTLS primarily leverage radio-frequency (RF) technologies like UWB, BLE and Chirp, as well as wireless devices, such as tracking tags and smartphones, alongside other integrated components, to continuously determine the position of people and objects in areas GPS is not able to reach. This delivers actionable location data that can be used to visualize the location of key personnel, assets, vital equipment and more on a live digital twin or integrated into automated workflows and systems such as IoT-enabled safety applications, asset & supply chain management solutions and more.
Real-time location systems are a key foundation of digital innovation, digital twin technology, IoT, and Industry 4.0, and help organizations in manufacturing, warehouses, and more transform physical operations by improving safety, boosting efficiency and driving business results.
How Does a Real-Time Location System Work?
 The specifics vary from system to system, but every RTLS uses a network of connected hardware and software to track the location of people and objects within a defined area. Most rely on RF technologies like UWB, Bluetooth, Wi-Fi, and chirp, for wireless communication between transmitting, receiving, and transceiving devices. A tag transmits data-encoded RF signals, or location "blinks," at continuous intervals.
The specifics vary from system to system, but every RTLS uses a network of connected hardware and software to track the location of people and objects within a defined area. Most rely on RF technologies like UWB, Bluetooth, Wi-Fi, and chirp, for wireless communication between transmitting, receiving, and transceiving devices. A tag transmits data-encoded RF signals, or location "blinks," at continuous intervals.
Fixed receivers (anchors or readers) mounted throughout the facility pick up those signals and forward the location data, along with any accompanying IoT data such as temperature or battery, to a location engine, which calculates each device's position. The technique used to determine location differs by technology: distance-based methods like time difference of arrival (TDoA) are generally more accurate than Received Signal Strength Indicator (RSSI).
Because an enterprise deployment can involve thousands of tracked assets, the location engine processes all of them concurrently in real time. That position data can then be visualized on a live digital twin of the facility or fed directly into enterprise systems like ERP and MES to power a range of location-aware use cases.
RTLS components can also enable ranging applications, where two transceiver tags communicate directly to measure the distance between them — the basis for proximity-based use cases such as worker-to-vehicle collision avoidance.
Indoor Positioning Techniques
.png?width=297&height=238&name=image%20(5).png)
Time-Difference of Arrival

TDoA utilizes UWB or Chirp anchors that are deployed in a fixed position throughout an indoor space. These anchors then detect and locate a transmitting device, such as a tracking tag. To work properly, the fixed anchors need to be accurately synchronized to run on the same clock. The tag, or other device, will transmit signals in regular intervals. These signals will be received by any anchors in the communication range and time-stamped by the anchors. All the time-stamped data is then sent to the central IPS or RTLS.
The location engine will analyze each anchor’s data and the differences in arrival times to each anchor and use multilateration to calculate the tag’s coordinates. Those coordinates can be used to visualize the location of the device on an indoor map of your space or leveraged for other uses depending on the specific application.

Two Way Ranging (TWR)
While in TDoA multiple fixed anchors work together to determine the location of a mobile object, Two-Way Ranging primarily uses two-way communication between two devices, such as smartphones or vehicle tags, to sense the distance between them. This means that an autonomous collision awareness system can be created without any additional infrastructure. With TWR, when a device is in close proximity to another, the two devices will start ranging with each other to determine their distance, even as they communicate. The time it takes a signal to travel between them is then multiplied by the speed of light and used to determine their relative positions, frequently, to enable location-aware communication.
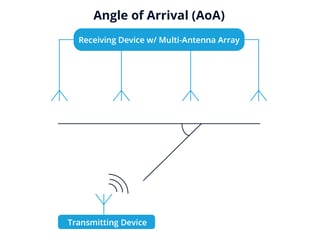
Angle of Arrival (AoA)
AoA is an advanced positioning method which can deliver with enhanced accuracy compared to more traditional techniques like fingerprinting and RSSI. This is possible due to Multiple Input Multiple Output (MIMO) interfaces. To be able to find direction, a mobile asset, such as a tag or beacon with a single antenna, transmits to a fixed RTLS sensor with a multi-antenna array. The phase shift of the multiple antennas, as a result of receiving the signal, is measured and calculated to determine the angle of the transmitting mobile device and create an area of certainty of the object to be located.
One advantage of an AoA approach is that it reduces the number of necessary reference points. Instead of a minimum of three sensors as required for any multilateration approach, you only need two to create an unambiguous determination of position. Additional reference points add to the accuracy and reliability of the calculated positions. While indoor positioning via AoA is more accurate than signal strength approaches, solutions that leverage this technique are only just entering the market.

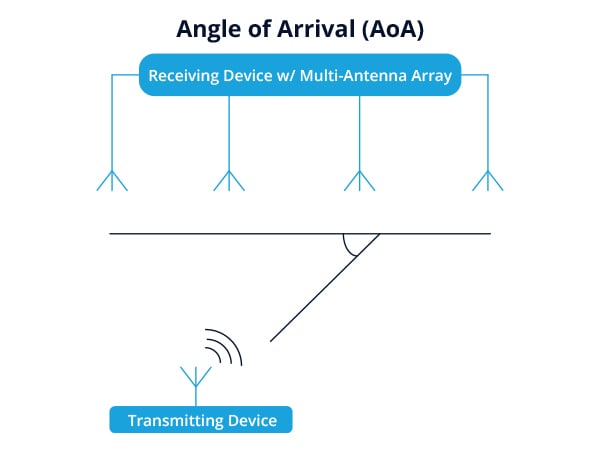
Received Signal Strength Indicator (RSSI)
In RSSI-based applications, multiple existing RTLS sensors deployed in a fixed position will detect transmitting devices and the received signal strength of the signal from the device. This location data collected by the sensors is sent to the location engine. The location engine analyzes the data and uses multilateration algorithms to estimate the location of transmitting devices. Alternatively, the signal strength of nearby sensors relative to a wireless device can be used to determine the device’s location.
Using an RSSI-based method with multilateration is the most easily activated and low-cost option for indoor positioning. However, it doesn't deliver a high degree of positional accuracy because it is subject to signal attenuation, absorption, reflection and interference.
